
Astro Pi: Launch is tonight!
![]()
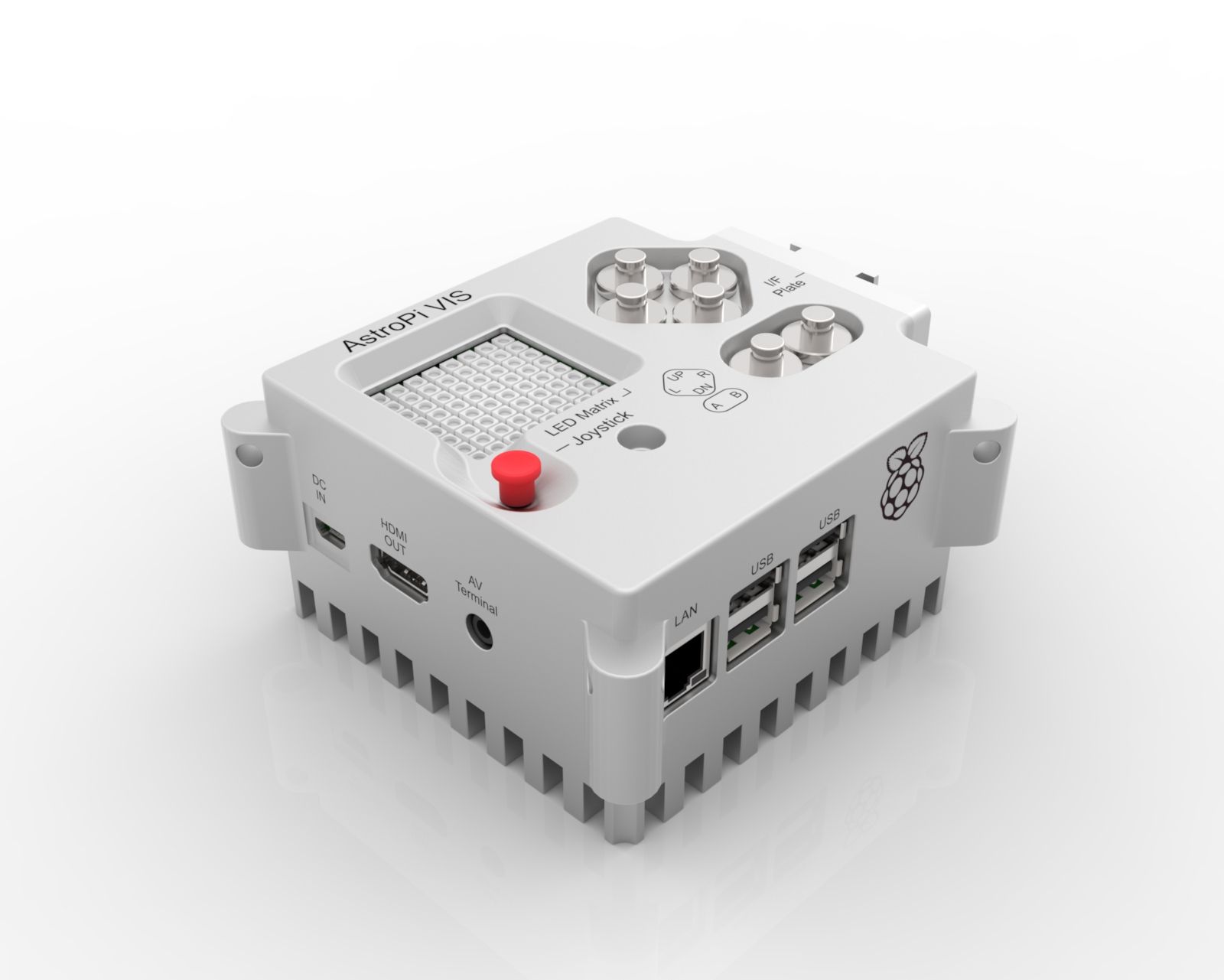
Tonight, two specially augmented Raspberry Pi computers, called Astro Pis, will launch into SPAAAAACE! The Astro Pis will be running experimental Python programs written by school-age students, where the results will be downloaded back to Earth and made available online for all to see.
- When: 22:55:41 GMT (first launch window opens)
- Where: Cape Canaveral, Florida, USA
- Coverage: NASA TV live stream (below, and keep an eye out – Astro Pi may get a mention in the launch commentary)
http://www.ustream.tv/nasahdtv
If you’ve been following the Astro Pi project, you’ll know that we were bumped from Tim Peake’s launch vehicle due to a cargo overbooking back in October.
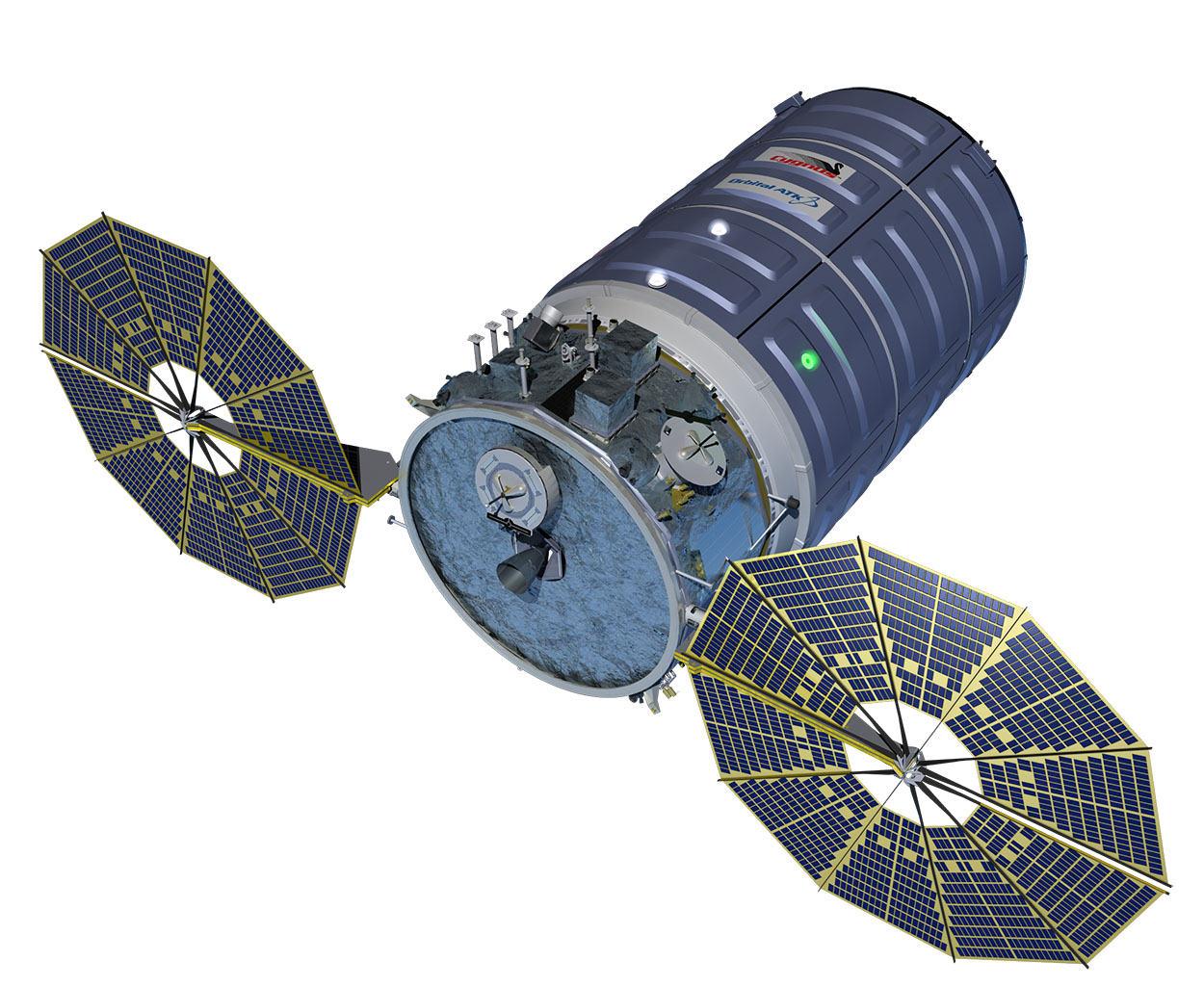
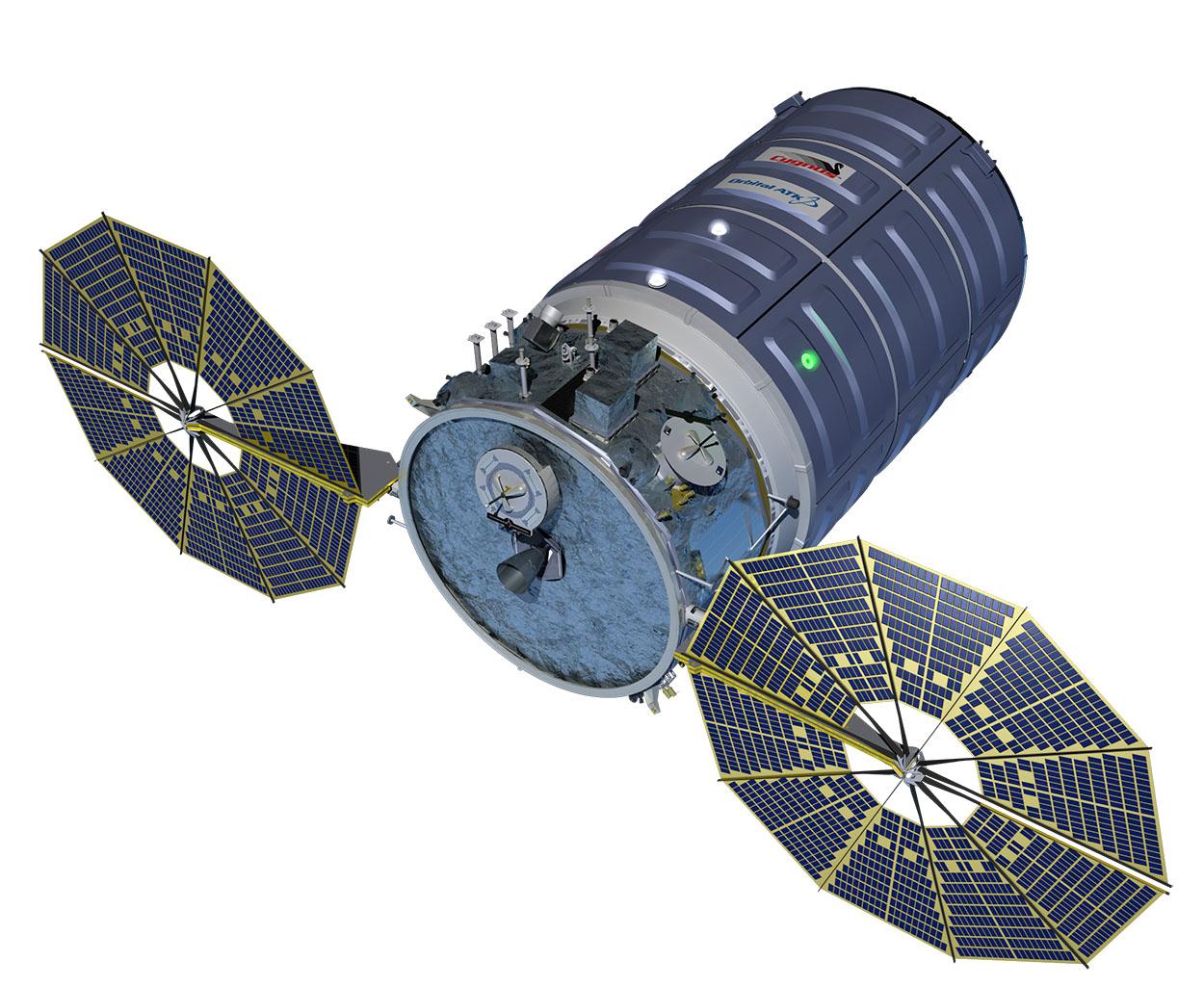
The OA-4 Cygnus Spacecraft, image credit: Orbital ATK
We’re now going to launch on Orbital Sciences’ Cygnus cargo freighter (an unmanned spacecraft, above) on its fourth supply mission to the ISS. Orbital Sciences have contracted ULA to launch it into space on an Atlas V rocket (below).

The Atlas V rocket, image credit: United Launch Alliance
When you need to rendezvous with an object in orbit, the timing of the launch is often critical to ensure that you get into the right orbital trajectory. This is often achieved with an instantaneous launch window where the rocket has to lift off at a precisely calculated time, otherwise the two objects will never meet in space.
Obviously, this approach can significantly limit the probability of an on-time launch. For instance, you may need to wait for a rain shower to pass by, a technical problem to be resolved or a boat in restricted waters to be chased away.
However, this is not the case for our launch! The Atlas V has so much performance capability that it provides a 30-minute launch window each day, and it’s all thanks to energy. The Atlas V has so much available energy that it can accommodate a very large off-nominal time of launch: 15 minutes early or 15 minutes late. The extra power is then used by clever steering algorithms to compensate for the rotation of the Earth, relative to the orbital target.
Below is the final configuration of the rocket. It will fly in the 401 vehicle configuration with a four-metre fairing, no solid rocket boosters, and a single-engine Centaur upper stage. The Astro Pis are sitting inside a small cargo transfer bag within the Cygnus spacecraft at the top.
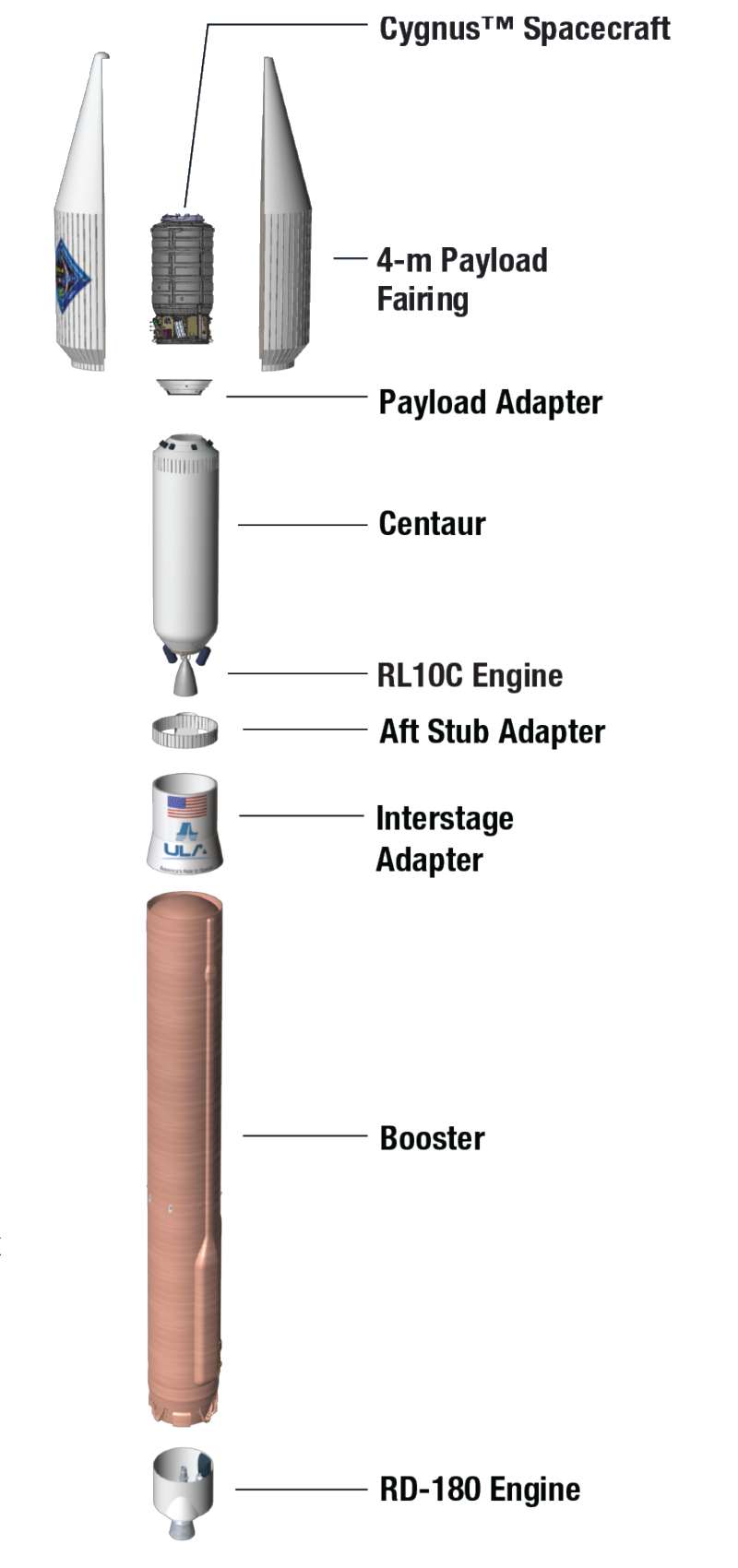
OA-4 Launch Configuration, image credit: United Launch Alliance
And here is the ascent profile, with the main events numbered.
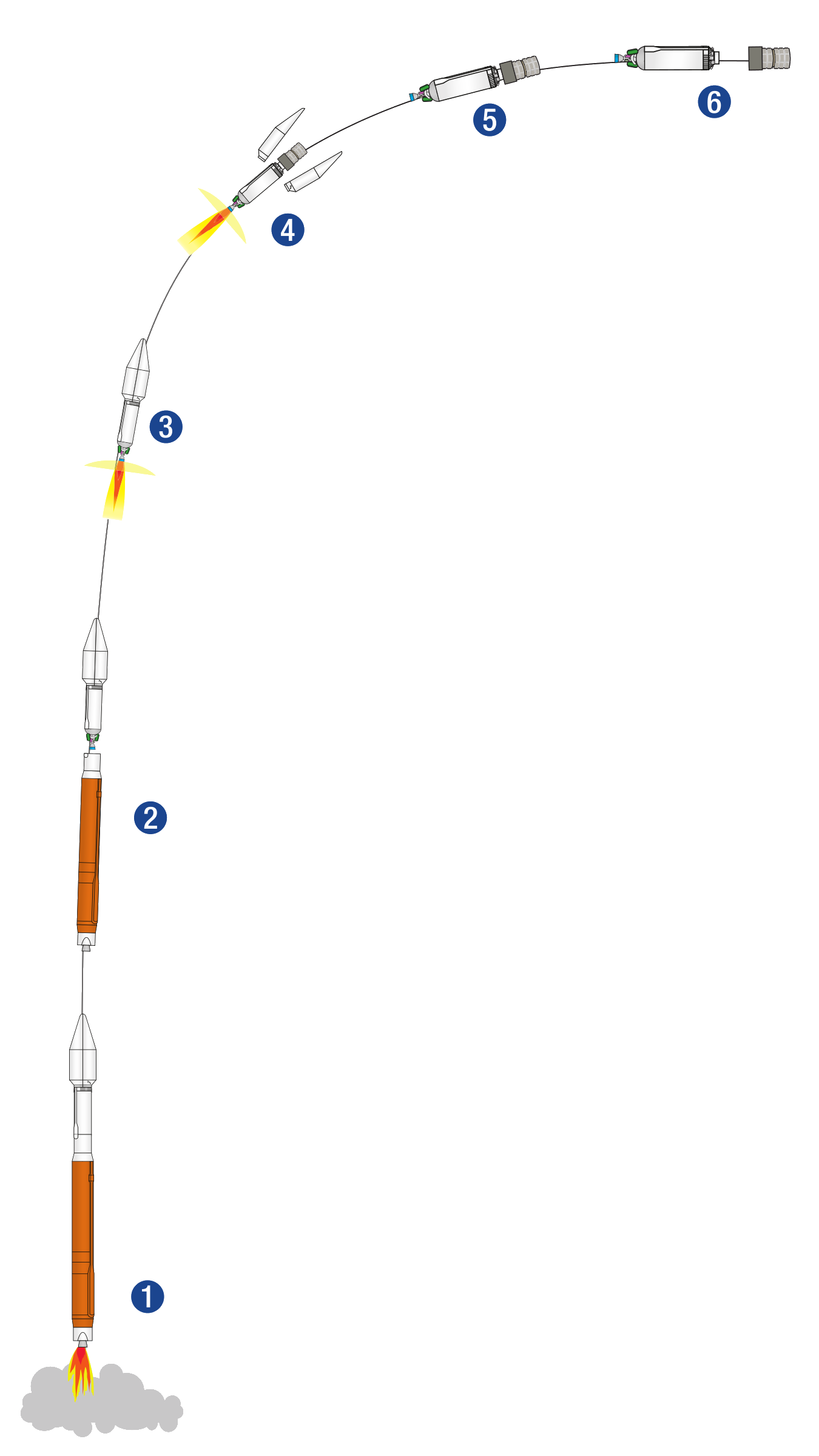
OA-4 Ascent Profile, image credit: United Launch Alliance
These are the event descriptions, with their times relative to lift-off.
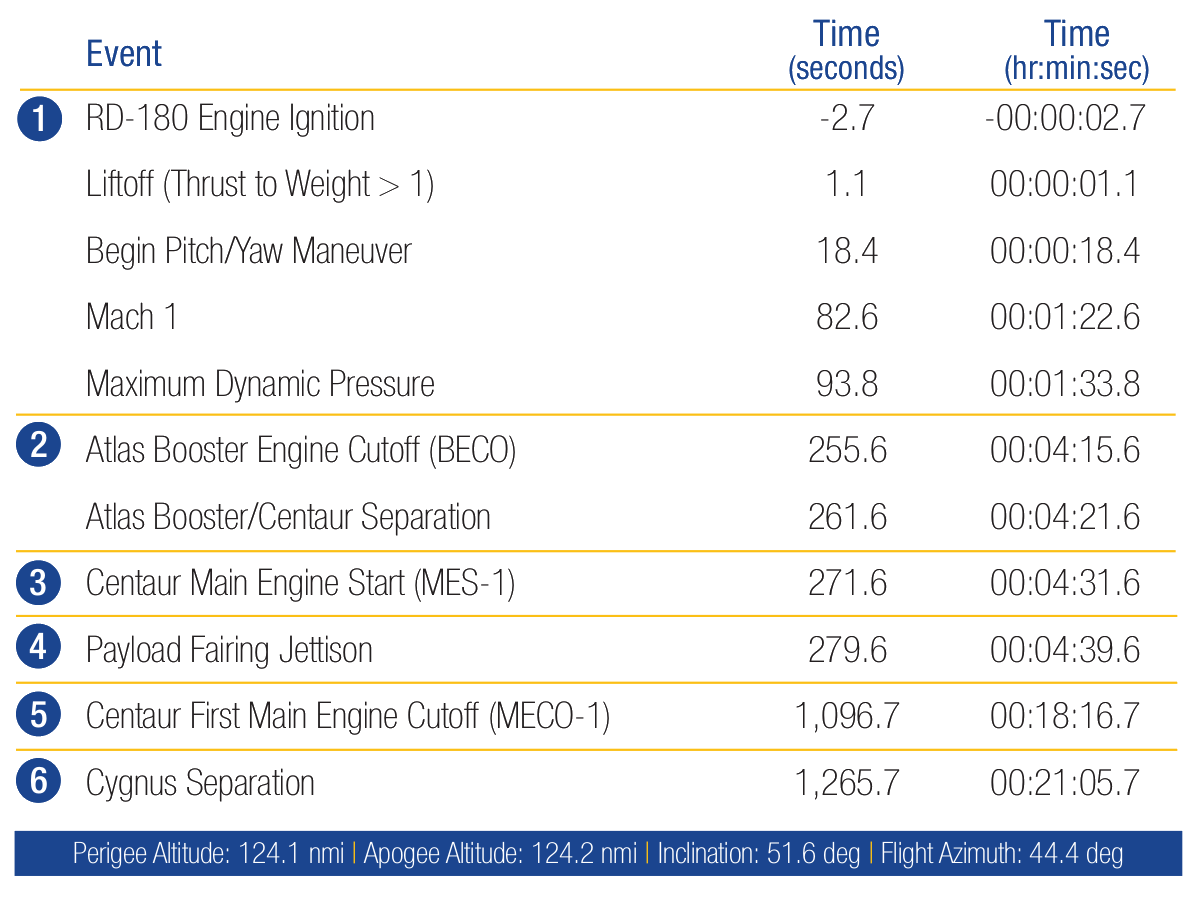
OA-4 Main Events, image credit: United Launch Alliance
And finally, this is the ground trace; note that it will pass over the UK around 23 minutes into the mission. However, it will be in the Earth’s shadow and so almost impossible to spot with the naked eye.
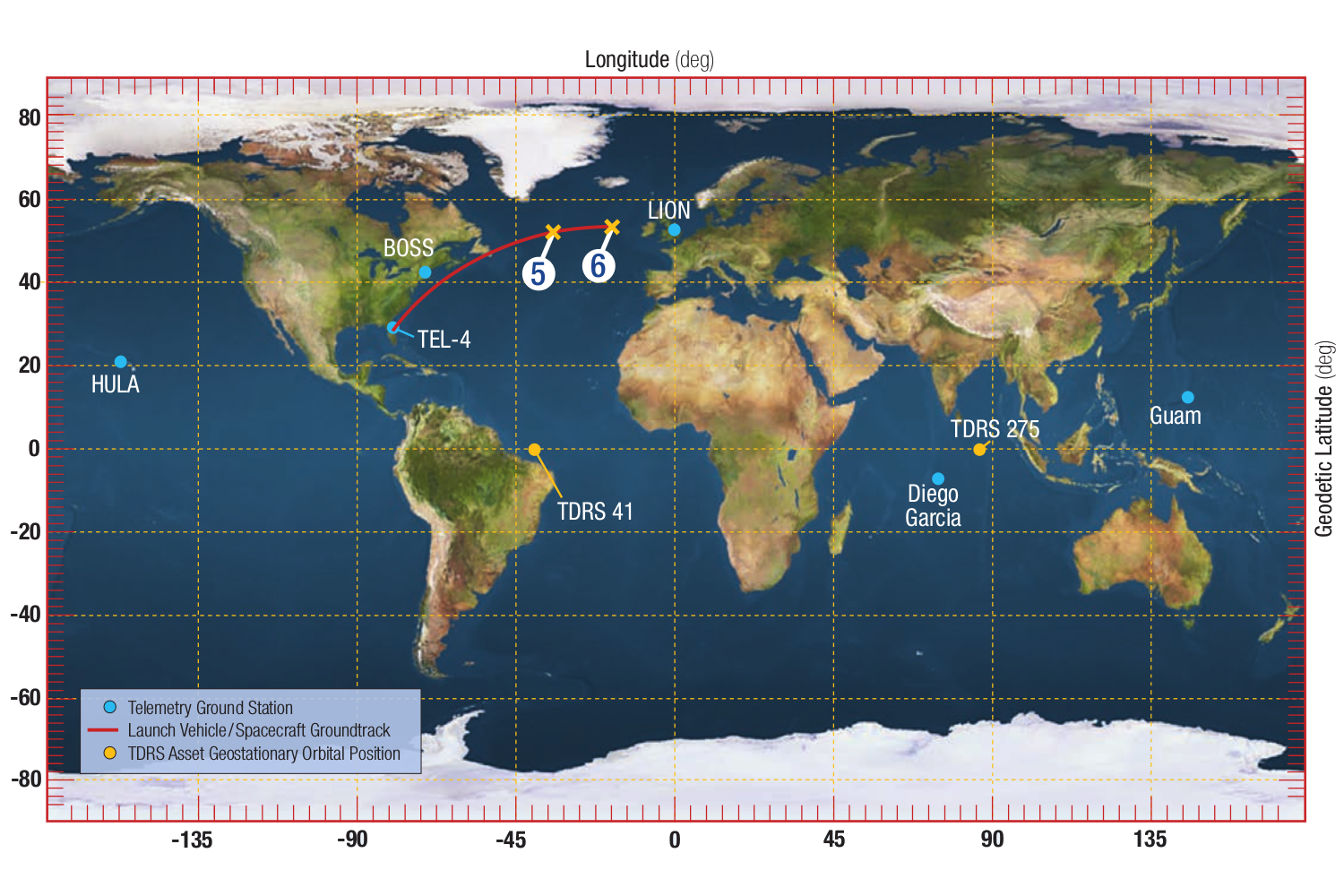
OA-4 Ground Trace, image credit: United Launch Alliance
If everything goes according to plan, the Cygnus spacecraft will arrive at the ISS on the 6th of December at 9:00 GMT. The docking is a fascinating process and really worth watching if you’re interested; NASA TV will show it. It involves one of the crew operating the Canadarm2 to grab onto the incoming spacecraft before pulling it in.

Cygnus being moved onto the pad yesterday – the two Raspberry Pis are in the cone at the top.
Should the launch be delayed for any reason, here is a list of subsequent launch windows that occur over the next few days:
- December 4
Launch: 22:33 GMT
ISS arrival: Dec 7 or 8
- December 5
Launch: 22:10 GMT
ISS arrival: Dec 9
- December 6
Launch: 21:44 GMT
ISS arrival: Dec 19
If it’s delayed to the 6th, it will have to loiter in orbit for a few weeks before it can dock with the ISS. This is because of other visiting vehicle traffic, such as the Soyuz 45S launching on December 15th, carrying Tim Peake and his crew mates.
I will be attending the launch at Kennedy Space Center, along with Matt Richardson and Jonathan Bell (AKA jdb on the forums). We will be live-tweeting from our personal Twitter accounts (@Dave_Spice and @MattRichardson), from the Raspberry Pi account and also from the main Astro Pi account.
Please follow the official Twitter account below for the very latest updates on the launch.
This has been a long road for us and our partners, so please keep fingers and toes crossed!


58 comments
Dave Akerman
At last, actual space this time; I’m looking forward to seeing my paltry 41km well and truly beaten :-)
Dave
Vinayak
All the very best!
AndrewS
How exciting!! I hope the launch of the plucky little Space-Pis goes well :)
Stewart Watkiss
Hopefully I should be able to watch this on a Raspberry Pi with the Kodi NASA TV plug-in.
Raspberry Pi Staff Liz Upton
I think I’m more excited about this launch than I was about the Pi Zero launch. (Badoom tish.)
Alex Eames – RasPi.TV
The countdown has to reach Zero before you can lift off.
Hope it goes well. Looking forward to photos/vid.
Dave Akerman
I watched a space shuttle launch in 2009, and forgot that the main engine start is a few seconds before T-0. Had to be quick on the camera button then :-)
ric96
Should’ve added a command to watch this live on the pi.
Anyways, best of luck!
Dougie
What’s the backup plan if this rocket launch fails or blows itself to smithereens?
Tom
There’s info on that at the end of this article – https://www.raspberrypi.org/blog/astro-pi-mission-update-7-launch-vehicle-changed/
Samuel Logan
We try again!!
After all, it only took a few MONTHS!!
Over-50
With all that excess power and all, you’d have thought they could have lit up the engines at T- 3.142 seconds…
Hope all goes well.
Mike
The link to the main raspberry pi twitter account is misspelled: */Raspberry_P –> */Raspberry_Pi.
Raspberry Pi Staff Liz Upton
Thanks!
Martin OHanlon
I am so excited… I’ve said it before and I’ll say it again! Code I wrote in on that bad boy!
Greg Warner
Per Adua ad Astra!
what an achievement!
Made an old guy happy
Good luck.
Open
Wow, tremendously awesome!
There is just so much potential for education and getting kids excited in the sciences with something like this.
Can’t wait till they are in operational status on the station and sending data.
Kudos to you guys for maintaining your vision and actively supporting such scholastic endeavors.
This is one of the reasons Raspberry Pi’s are popular, not only because they are great products in themselves.
It feels good buying them knowing that proceeds from sales actually go to such programs.
Wish the best of luck for a safe flight (also have my arms, legs, eyes, etc crossed)
Shea Silverman
So excited that I get to watch this from my backyard! Hopefully the wind dies down a bit and the clouds open up. This is going to be a great launch!
Congrats all!
-Shea
Peter Ryan
Looks like a bit of rain on the camera lens. Could someone just pop out there and give it a wipe please? Cheers! ;)
Steve H
…the anticipation is killing me… can’t one of you clever people create a fleet of RPi drone – cloud n rain removers?!
Steve H
…never mind, another day tomorrow and 23 hours for the Pi community to get those cloud removing drones, designed, manufactured and dispatched! If any one can, Pi community can!
Steve H
…and a giant wind break?!
Steve H
Congratulations all!
And thank you for such great edutainment. :o)
hans
Over 10k viewers. I wonder howmany without the pi’s on board. Stayed up till wel over midnight ( holland ) to see it go … well it did’nt. Tommorow is another day ….
Lee Wilkin
Wow, *what* an incredible end to this amazing year for Raspberry Pi! :-)
Let’s all keep our fingers (and toes) crossed that the weather doesn’t scrub tomorrow evening’s launch window too (Friday 22.33hrs)….
Fester Bestertester
Friday 22.33hrs GMT = Saturday 09:33hrs NZDT. I’ll be watching NASA TV’s Live feed.
And if that’s scrubbed the next one will be “Ford Time” GMT: Tin-past-Tin :)
Fester Bestertester
Sorry, timezones are always confusing. It’ll be 11:33 NZDT, with NZ 13hrs *ahead* of GMT.
Pi Enthusiast
Wow! I still can hardly believe that a credit-card size computer made by a small non-profit organization is going into space! This must be a huge factor of excitement among the pi foundation. To the pi foundation, let’s give a cheer!
Pi Enthusiast
Also, what is the time in U.S. central? Time is really confusing.
RoyS
Looking for Sputnik (so small and invisible but the booster and fairing were visible) in Oct 1957 with my Grampie, made a lasting impression on a 7 year old boy. Visit http://www.n2yo.com for the best tracking (as I type the ISS is just going over me in nodnoL (Red Dwarf) and reaches most northerly inclination over Chingford.) Obviously the sats are not visible during the day, and must be in sunlight while (whilst? been away for 56 years) the observer is not. Funny how the US use countdowns – eg: T Minus 15 minutes, whilst the Russians simply say GO at the right time, irregardless (not a word) of a 30 minute launch window.
Tim
trying to watch the launch, but closed captions are not working for me,
MalMan
7 more minutes! I am updating my pi to newest version of debian while I am waiting :D
Tim
now I just see two guys talking….. is the launch still on today?
Jonathan
No. It was scrubbed, they will try again tomorrow.
Tim
Thanks Jonathon,I really appreciate your answer
Richard Sierakowski
Even rockets have to give way to the wind. Hopefully tomorrow; but only a 30% probability of favourable conditions.
Richard
MalMan
Yeah to bad about the wind. Oh well I got my rpi updated :D
Jim Manley
Please note the red, white, and blue emblem on the side of the Centaur stage, which means this launch vehicle was largely designed, manufactured, delivered, assembled, staged, and otherwise operated by the best people on the planet with space expertise, and it will be launched mostly at U.S. taxpayers’ expense. You’re welcome, and we’re more than glad to do it, because we have the will to Git ‘Er Done, as Larry the Cable Guy would proudly say. As Russian comedian Yakov Smirnov has been known to say, “America, what a country!”
We’re the melting pot of the poor, the downtrodden, the mongrels of societies world-wide (but enough about our immigrants of a certain Anglo-Saxon descent, including my ancestors! ;) all assembled here and working shoulder-to-shoulder in full harmony (well, more or less), to form a more perfect union (would you believe a less imperfect union? :) establish Justice (OK, we’re still working on that), insure domestic Tranquility (hey, it’s also a work-in-progress), provide for the common defense (got that one down pretty cold, IMNSHO), promote the general Welfare (but not so much the Welfare State), and secure the Blessings of Liberty to ourselves and our Posterity (or Posterior-ity, as may seem fit ;) ” ‘Merica!” :D
Yeah, go ahead and smirk, but where’s _your_ Atlas/Centaur boosters, manufacturing, launch, and operations facilities, etc. It’s criminal that we’re relying on thugs operating 40-plus year-old rocket components to get astronauts into space, but that will be fixed soon enough, with a little help from our friends elsewhere. And we thank you for your support …
Jim Manley
The next launch attempt will be on December 5, 2015 at 5:10 p.m. Eastern Time – your time zone may vary! The launch window is 10 minutes wide (+/- 5 minutes).
Jim Manley
The launch of Orbital ATK’s Cygnus cargo spacecraft to the International Space Station has moved to Sunday at 4:44 p.m. EST, the start of a 30-minute launch window for the uncrewed spacecraft to begin it mission. Countdown and launch coverage will begin here on the NASA Blog and on NASA TV at 3:45 p.m. Saturday’s attempt was called off because of high winds that were expected to violate launch criteria throughout the 30-minute launch window. The weather forecast for Sunday improved to a 40 percent chance of acceptable conditions at launch time.
Jim Green
Launch scubbed again. Next attempt is scheduled for 2015-12-06 16:44 EST.
Tim
Could someone please give me a current update?
Tim
Oh, I got it now, tomorrow…..
RoyS
A good satellite tracker is GPREDICT for the Pi.
sudo apt-get update
sudo apt-get -y upgrade
sudo apt-get install -y gpredict kstars
It must be updated periodically (every day at least if it is being used for accurate tracking predictions) by Edit – Update TLE – From Network. A TLE is a Two Line Element best explained – https://en.wikipedia.org/wiki/Two-line_element_set
Menu – Education – GNOME Predict.
Edit – Preferences – check Show Local Time…then Ground Stations – Add New – Name (Cape) – Select (US – Florida – Nasa Shuttle) – OK, check Cape as Default. Include your own location in the same manner. Shutdown and restart gpredict.
Use your own location for exact local predictions. Use Cape only for launches.
File – New Module – Module Name: ISS, Search iss, click on found ISS on the left, click on arrow right to move it to the Selected Satellites List, OK
Now you are A-OK and ready to go! The launch of a new satellite takes place before the ISS directly goes over the launch site ie. the launch window.
Rick
Suggestion:
Stick a date on your blog posts. From the homepage ‘tonight’ is not obvious. So I entered the post to read it. No post date at the top or bottom.
Hans Lepoeter
No need Rick, The headline is true every single day sofar to the best of anyones knowledge. For 4 days on a row now was it not ? :-)
Hans Lepoeter
Holdon … something has changed ….. can someone update the title now :-).
AndrewS
There is a date in the top-right “Posted by” box – it says this blog was posted at “3rd Dec 2015 at 11:34 am”.
But that box automatically disappears if your browser window isn’t wide enough.
ric96
did anyone notice a baseball bat on a desk on in the iss control center?
Richard Sierakowski
So far all is progressing well.
Richard
Richard Sierakowski
Cygnus cargo-delivery freighter now successfully separated from booster and off under its own power to RV with the ISS.
ColinD
Well done on the first full-size Raspberry Pi controlled rocket launch! ;)
Hans Lepoeter
anyone knows if the delay and the extra delay because docking has to wait for other spacecraft is going to affect deployment date or experimentation time ?
Raspberry Pi Staff Liz Upton
No, not at all – Tim himself doesn’t get up until Dec 15.
Paulie
Awesome work!
I sat through the last two launch windows, which were both scrubbed. Had to go out, and missed the live launch tonight by ten minutes.
The replays of the various camera positions was worth watching.It’s hard to believe that It’s gone from a prototype, to a ride to the ISS in a few short years.
Dougie
Well done.
Per ardua ad astro_pi
Through hard work to the space pi.
Ken MacIver
Pi style Xmas Cracker gags
Latest tiny computer launched; The Raspberry Pi Zero G
Q. How do you measure the circumference of the Earth
A. Put Two Pi’s around it.
I’ll get me coat..
Huge congratalutions to all involved, and fingers crossed for Tim and his crew.
Samuel Logan
Hope all goes well! :)