Teaching resources
Computing is a vital aspect of today’s world. We want to empower teachers to give young people the skills they need to shape this world.
We provide high-quality CPD training courses, classroom resources, and online events for teachers. All for free.
Subscribe to our newsletter
For the classroom
These resources are designed for teachers to use in the classroom. They contain everything you need, like lesson plans, worksheets, homework, and exam preparation.

Computing aimed at ages 5 to 16
The Computing Curriculum has lesson plans and resources aimed at UK key stages 1 to 4, but they can be used wherever you are.

Computer science aimed at ages 14 to 19
Developed with the University of Cambridge, Ada Computer Science offers world-leading computing education for older students.

AI and machine learning
Developed in collaboration with Google DeepMind, Experience AI offers resources and support to help teach about artificial intelligence and machine learning. Aimed at ages 11 to 14.
Experience CS
Experience CS is a free, integrated computer science curriculum. It provides everything that elementary and middle school teachers need to teach computer science concepts and knowledge through core subjects like math, science, languages, and the arts.
Experience CS
Code Classroom
Code Classroom is a free, safe platform for teaching and learning computing in schools.
It includes a simple-to-use code editor with different programming languages, and lots of other features to support your teaching.
Try Code Classroom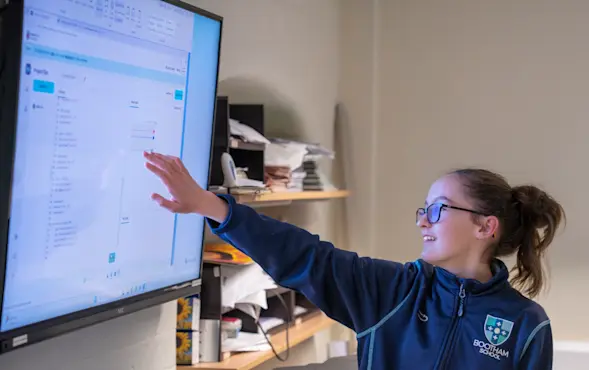
Courses and reading for educators
Learn a new skill or build your confidence in teaching coding. We have free courses and a magazine created by educators, for educators.
Free computing courses
Take a course for your continual professional development (CPD). Our courses help all experience levels, whether you’re just beginning or are more advanced.

Hello World magazine
Our regular, free computing and digital making magazine for educators. Read in-depth discussion, project ideas, lesson plans, news, and reviews.
Start a Code Club
Code Clubs are fun and supportive places where young people learn to code in a way that works for them.
You can run a club in your school outside of lesson time, or in a public space like a library or community centre. We have lots of free support available to help you get started.
Learn about Code Club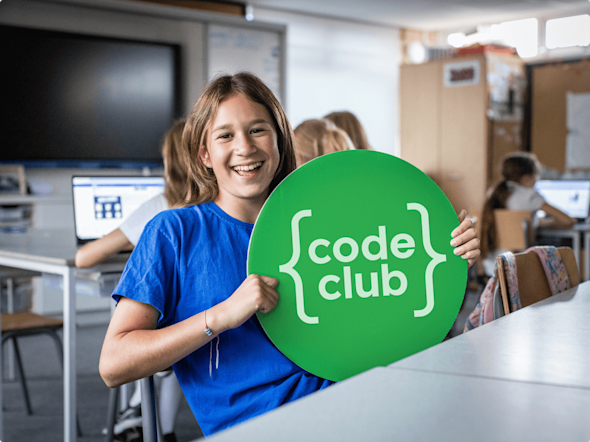
More teaching resources
Online coding projects
There are hundreds of free coding and computing projects, all with step-by-step instructions.

Coolest Projects
Our annual technology showcase celebrates creations from young people all around the world.
Code in space
The European Astro Pi Challenge gets young learners to write code that runs on the International Space Station.
Pedagogy and research
The latest computing education research informs our teaching and learning resources. Our pedagogy principles shape the resources we create.
We developed our pedagogy principles based on current evidence into the best ways to teach and learn about computing.
Learn about our pedagogy



