
Astro Pi: Mission Update 5 – flight safety testing
![]()
The road to space is long and winding, but the two Astro Pi flight units are almost there! The next thing for us after this is to hand over the final payload to the European Space Agency so it can be loaded onto the Soyuz-45S rocket for launch on December 15th with British ESA Astronaut Tim Peake.
To be allowed on the rocket, you need a flight safety certificate for your device, and these can only be obtained by presenting a whole host of measurements and test results to a panel of experts at ESA ESTEC in Holland.
The expertise and equipment to carry out many of these tests is well outside the capabilities of the Raspberry Pi Foundation, and without the facilities and personnel available through our UK Space partners this would not have been possible – we’ve had to use facilities and partners all over Europe to get the work done.
I’ll list below the tests that were done approximately in chronological order starting from March.
Power integration test
AIRBUS Defence and Space, Bremen, Germany >
Here is how the #AstroPi will get power from @ISS_Research mains. 120 VDC to 120 VAC inverter https://t.co/TG3ab9uNFb pic.twitter.com/rl63e7An9q
— Astro Pi (@Astro_Pi) July 13, 2015
Once in orbit, the Astro Pi will have two ways of getting power. It can use an AC inverter (above) that allows the crew to use all kinds of standard domestic appliances (like a normal USB power block); it’s also able to get power from any laptop USB port.
It is likely that when the Astro Pi is deployed in the Columbus module we will run from an AC inverter, but when we’re in the Cupola module we’ll just draw power from one of the laptops which is also there.
To gain permission to draw power from a laptop like this we needed to do a power integration test, to evaluate that the electrical load doesn’t have any adverse effect on the laptop.
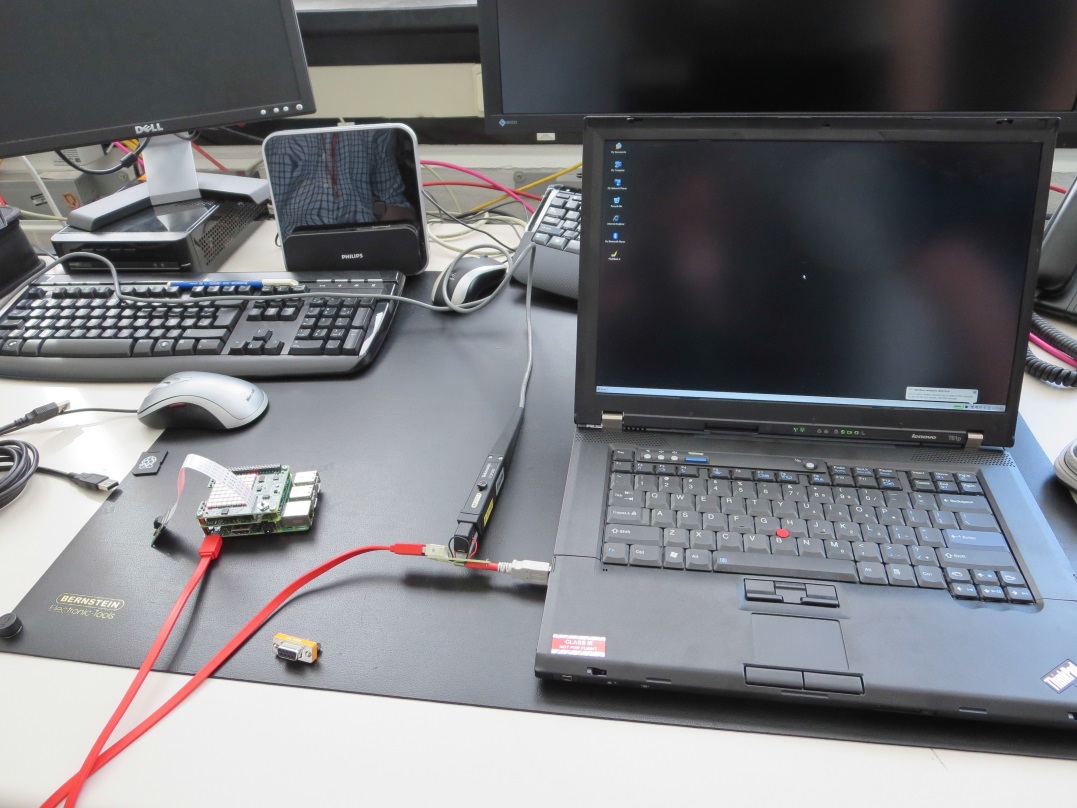
The most common laptop on the ISS is the IBM Thinkpad T61P (circa 2007 from before Lenovo acquired them – Eben also uses one of these). Pictured above is an identical ground laptop with a special USB current probe connected to an oscilloscope. Note that this was done before we had the aluminium flight case, so you’re just seeing the Sense HAT, Raspberry Pi and camera parts of the whole Astro Pi unit.
The flight hardware was then powered up through the current probe so the oscilloscope could measure current inrush as well as maximum current when using the Astro Pi at max performance. Some diagnostic software was then used to check that there were no adverse affects experienced by the laptop.
Coin Cell Battery
Surrey Satellite Technology, Guildford, UK >
Since the Astro Pi will not be connected to the LAN on the ISS the only means it has of keeping the correct time is with a Real Time Clock (RTC) and a backup battery.
The flight stack up for Astro Pi is as follows:
- Raspberry Pi B+
- Custom RTC Board (has coin cell holder and push button contacts)
- Sense HAT
Batteries on the ISS have a whole host of possible hazards associated with them, and so any battery flown is subject to a stringent set of batch tests.
Astro Pi has a batch of eight Panasonic BR-1225 coin cells which were all tested together. Here is number 5, which is one of the ones that will fly:


The test procedure involved visually inspecting the coin cells, measuring their width and size with callipers, testing their voltage output during open circuit and under load followed by exposing them to a vacuum of about 0.6 bar (~450 mmHg) for two hours.
Afterwards the measurements were redone to see if the coin cells had leaked, deformed or become unable to provide power.
Conformal Coating
Surrey Satellite Technology, Guildford, UK >
One of the safety requirements for circuit boards in space flight is that they are coated in a protective layer, rather like nail varnish, called conformal coating. This is a space grade silicone-based liquid that dries to form a hard barrier. In microgravity a metallurgical phenomenon called tin whiskers occurs. These are tiny hairs of metal that grow spontaneously from any metallic surface, especially solder joints.
The hazard here is that these little whiskers break off, float off and become lodged somewhere causing a short circuit. So the conformal coat has two purposes. One is to protect the PCB from any invading whiskers, and the other is to arrest any tin whiskers that may grow, and prevent them breaking free.

For the Sense HAT (above) we needed to define a number of keep out zones for the coating so as not to compromise the pressure and humidity sensors. The surfaces of the LEDs were not coated to avoid dulling their light too. If you look closely you can see the shiny coating on the HAT; in particular, see the joystick bottom right.
It’s much easier to see on two camera modules:


Vibration
AIRBUS Defence and Space, Portsmouth, UK >
Vibe testing is not actually required for safety, but we undertook it anyway as insurance that the payload would survive the vibration environment of launch. The testing involved placing an Astro Pi into some flight equivalent packaging and strapping it down onto a vibe table.
The vibe table is then programmed to simulate the severity of launch conditions on a Soyuz rocket.
Flight hardware about to go through Soyuz launch conditions vibration testing at @AirbusDS @JohnChinner @dave_spice pic.twitter.com/zphG5kpSuR
— Astro Pi (@Astro_Pi) May 28, 2015
The tests needed to be done in x, y and z axes. To accomplish this two different vibe tables were employed, one for up and down (z, see above) and one for back and forth (x and y, see below).
After the vibration sequence the Astro Pi was tested to ensure the vibration had not caused any issues, the case was also opened and the interior was inspected to ensure no connections had become loose.
Electromagnetic Compatibility (EMC)
AIRBUS Defence and Space, Portsmouth, UK >
EMC is the study and measurement of unintended electromagnetic signals that could interfere with other electronics. Almost all electronic devices these days undergo EMC testing in order to get CE or FCC markings. The Raspberry Pi B+ and Sense HAT both carry these markings; however their test results were obtained in a home-user setup, with a keyboard, mouse, HDMI monitor and Ethernet all connected.
The Astro Pi flight unit will be used without all of those. So these tests were required to ensure that, when used in this way, the Astro Pi doesn’t cause any problems to other systems on board the ISS (like life support).
Trying to detect micro-volt level emissions from @astro_pi using big, sensitive antennas! pic.twitter.com/AwxA8Ood4B
— John Chinner 🇪🇺🇬🇧 (@JohnChinner) June 3, 2015
The tests were conducted in a special EMC test chamber. The walls are lined with super-absorbent foam spikes that exclude all electromagnetic signals from coming into the room from the outside.
Now in the EMC chamber! pic.twitter.com/hjeMfozUSn
— Astro Pi (@Astro_Pi) May 28, 2015
That way, any electromagnetic signal measured must have originated inside the room.
Testing the emissions of @astro_pi above 1GHz. Looking for any signals from it that might interfere with ISS systems. pic.twitter.com/DGIbCEbjZa
— John Chinner 🇪🇺🇬🇧 (@JohnChinner) June 2, 2015
A test script was run on the Astro Pi to stress it to maximum performance while a series of antennae were used to examine different ranges of the electromagnetic spectrum.
This antenna is looking for any minuscule radio signals emitted from @astro_pi between 30 and 200MHz. Test passed! pic.twitter.com/D8j8dOTFMm
— John Chinner 🇪🇺🇬🇧 (@JohnChinner) June 2, 2015
A set of electromagnetic susceptibility tests was also conducted to evaluate how the Astro Pi would behave when experiencing strong magnetic fields.
Testing @astro_pi against AC magnetic fields produced by this coil. Still working perfectly. pic.twitter.com/O4RcCiHqba
— John Chinner 🇪🇺🇬🇧 (@JohnChinner) June 5, 2015
No issues were found, and all tests passed.
Off Gassing
ESA ESTEC, Noordwijk, Holland >
The off-gassing test is done to ensure the payload does not give off any dangerous fumes that might be harmful to the crew.
The test involves placing the payload into a bell jar and pumping out all of the air. Synthetic air of known properties is then pumped in, and the whole jar is held at 50 degrees Celsius for 72 hours. Afterwards the synthetic air, plus any gasses released by the payload, are pumped out and analysed using a mass spectrometer.
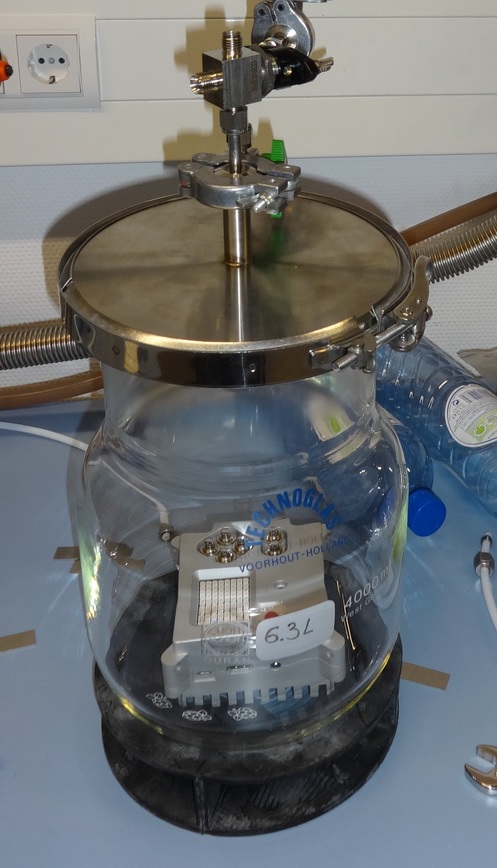
If you look closely, you can also see some Raspberry Pi SD cards in there. The test needed to be representative of the entire payload, so it’s one of the flight units plus five SD cards. The resulting measurements were then just doubled to account for two Astro Pi units with ten SD cards.
Thermal Capacity
Raspberry Pi, Cambridge, UK
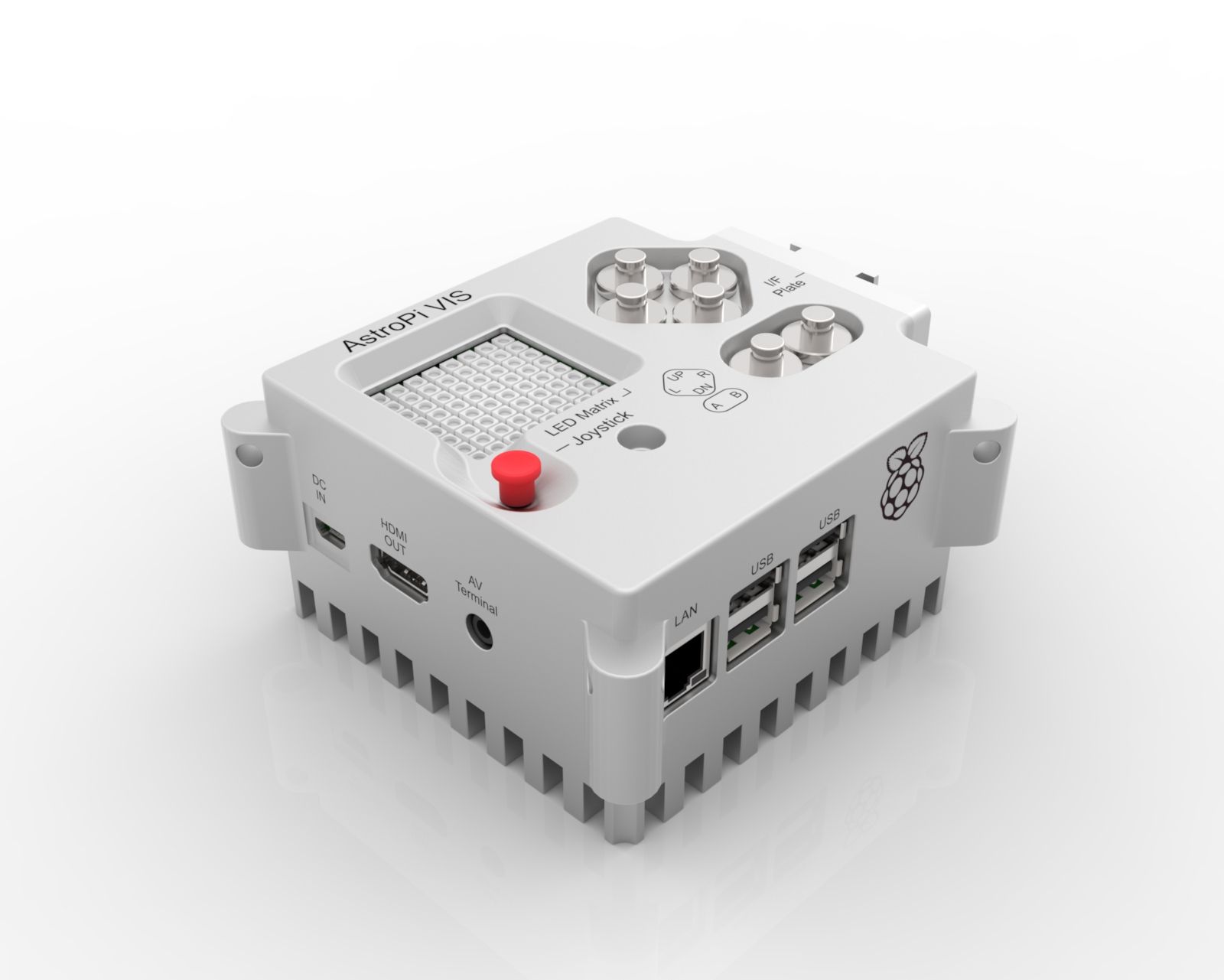
This test needed to demonstrate that no touchable surface of the Astro Pi flight case would ever reach or exceed 45 degrees Celsius.
In microgravity the process of convection doesn’t occur, so the case was designed with thermal conduction in mind. Each of the square pins on the base can dissipate about 0.1 watts of heat. We also wanted to avoid any fans as these cause EMC headaches and other problems for safety (moving parts).
https://twitter.com/dave_spice/status/613347243630968832
We used five temperature probes connected to another Raspberry Pi for the data logging. Four of the probes were placed in contact with the surface of the aluminium case using small thermal pads and kapton tape (HDMI side, base by the camera, SD card slot side and top side). One was used to monitor ambient temperature some distance away. The Astro Pi was then placed inside a small box to simulate the reduced airflow on board the ISS and was then stressed to maximum performance for four days.
The results showed that an equilibrium was reached fairly quickly where the only input into the system was the fluctuation of ambient temperature.
Sharp edges inspection
ESA ESTEC, Noordwijk, Holland >
This test was almost a formality, but was done so ESA could verify there were no sharp edges that could cause harm to the crew. The test was done using a special piece of fabric that was dragged over the surface of the flight case. If it snags then the test is failed, but thankfully we passed without issue first time.
Our final test was done this morning! The sharp edges inspection. This was done with the final flight articles. pic.twitter.com/VaEbIppWfI
— Astro Pi (@Astro_Pi) July 10, 2015
The test is important because a crew member with a cut or infected hand is a serious problem in orbit.
Experiment Sequence Test
ESA-EAC, European Astronaut Centre, Cologne, Germany >
The experiment sequence test is a full end-to-end reproduction of everything that Tim Peake will do on orbit. It was done in a replica of the ISS Columbus module on the ground.
On orbit they have step by step procedures that the crew follow and these tests are an opportunity to improve and refine them. There is a procedure for deploying the Astro Pi, one for powering it from the ISS mains, and another for powering via laptop power. There is one for fault finding and diagnostics and also one for getting files off the Astro Pi for downlink to Earth.
We're at @esa's European Astronaut Centre today testing #AstroPi flight procedures ready for @astro_timpeake to use pic.twitter.com/gcR5QRDweW
— Astro Pi (@Astro_Pi) August 10, 2015
The tests used a surrogate crew to play the role of Tim Peake. Each procedure was run, and any anomalies or problems that caused a deviation from the procedure were noted.
The Astro Pi looks very much at home in the Columbus mock up! Testing all going well so far. pic.twitter.com/M3emHTC8JO
— Astro Pi (@Astro_Pi) August 10, 2015
The Astro Pi will run a Python program called the MCP (master control program*) and this oversees the running of the competition winning code from the students. It is designed to monitor how long each has run for, and ensures that each receives the allotted run time, despite the Astro Pi being, potentially, rebooted multiple times from single event upsets due to the radiation environment on the ISS.
There were a couple of minor issues found, and we’re required to repeat one of the tests again in September. But otherwise everything worked successfully.
All the test reports are then combined into a Flight Safety Data Pack (FSDP). This also includes a flammability assessment which is an examination of all materials used in the payload and their risk of being a flame propagation path on the ISS. The main heavy lifting with the FSDP documentation was done by Surrey Satellite Technology, whom we’re eternally grateful to.
Thanks for reading if you made it this far! Next mission update will be after we’ve handed over the final payload.



21 comments
alexeames
What a colossal amount of work. Very interesting Dave. Well done!
It seems like just about everything can become a major issue in space.
Raspberry Pi Staff Liz Upton
We should also point out that our very own Jonathan has done a HUGE amount of work on the flight safety testing; look out for an interview with him in the MagPi in a couple of months!
David Honess — post author
Indeed. Jonathan Bell all did the heavy lifting providing the technical documentation about the payload to SSTL and ESA as well as leading the case design, manufacture and assembly of the flight units which went through several iterations. We wouldn’t be here without his hard work and that of others in the UK Space industry and ESA. The above post only partially covers the amount of work that has gone into this project to be honest. There are too many people to thank!
Niall Saunders
Looking forward to the MagPi article – I still think that you made a mistake the day Jonathan arrived at Pi Towers – and gave up his entitled space on the Pi Blog to some random Prime Ministerial visit!!
And, at last, my long-held suspicions that Jonathan WAS a Rocket Scientist are now being confirmed (although, unfortunately, I can’t really get away with claiming to have ‘taught him everything he knows’ any more !!).
Still – an all-round incredible achievement for our humble Pi – can you imagine getting a BBC Micro into space on a Shuttle launch back in the early ’80s? Houston would definitely have had a problem with that.
Cheers,
Niall
The Other Peter Green
I see both of the camera modules say “SUNNY”. Obviously in space there is no need for a “CLOUDY” setting.
Badoom-tish.
Ken Maciver
As I always suspected rocket science is easy(-ish).
Rocket Engineering is difficult,demanding and fascinating.
whheydt
I rather like the Tron reference. Was there a test to ensure that the MCP it won’t try take over the ISS?
David Honess — post author
I was waiting for someone to comment on that! The MCP is a 500 line Python 3.2 program, so I don’t think we need to worry about it becoming self aware anytime haha!
Also the Astro Pi is planned to be used headless at all times. We didn’t do any certification to be allowed on the OPS LAN or the NPCC LAN. We may do this for a future mission though :)
ColinD
An incredibly interesting article, many thanks. I always guessed (not knew) that there would be a lot of tests to get any h/w onto the ISS but had not a clue what they were for a small package like the Raspberry Pi.
From reading the article it looks like you have to use the actual components (ie: the actual Pi’s that will fly). How does that work with the battery test as it states “testing their voltage output … under load” which presumably reduces the available current: do you mean you just tested one of the batteries (so that one will be a little flat) but the others are not tested and fine?
David Honess — post author
Hi Colin. In our case we used the actual flight articles because no equivalent engineering models of various parts existed at the time. With big stuff like proper satellites you would never do this because the testing moves it towards its end of life (especially things like Vibe). But with small payloads it doesn’t make a huge amount of difference. With Batteries though you always have to fly with the exact articles that were tested. The tests don’t last for very long, they just load the battery for long enough to make the measurements. So the amount of capacity lost is almost immeasurable.
We do, now, have six identical flight Astro Pis that are going to remain on Earth though. They will be used by us, UK Space Agency, ESA and BIOTESC for crew procedure testing or if and when we need to try and recreate an anomaly that is found on orbit.
ColinD
Thanks for clearing that up David; yes EoL was what I was thinking about when I asked.
Zogk
What is the minimum temperature at which the Raspberry Pi will run? While most passive componenets are available rated to -40°, are the ICs rated to this?
Christine Malec
If I coated myself in a silicone-based liquid could I go up in the Soyuz too?
ColinD
I’m sure that was a scene from Galaxy Quest.
Andrew Chinn
I love your “Special piece of fabric” that tests for snags. So scientific!
A great article though and interesting to read the steps that have to be taken in order to make something space-safe.
Ton van Overbeek
Thanks for the detailed testing overview. For a complete satellite all instruments, boxes, actuators, etc. have to go through all these steps to get qualified for flight. Now you know where most of the cost for a satellite goes
(testing and documentation).
Nicholas Tollervey
It is wonderful to see this progressing. Really great work (as always and once again) RPi Foundation..! :-)
Michael Horne
What an incredible process to get through. Congrats to Dave, Jonathan and anyone else who helped. You are a “Go” :-)
Nigel Honess
Hi Dave and all responsible for all this hard work undertaken.
I wish everyone a successful outcome, and a safe flight for Tim and both crews. …Its been a…”long and winding road”
DAD
Rick Fincher
Once the Pi gone through the expense of passing flight safety checks, I could see it being used for all sorts of things in orbit. It’s low cost, much smaller and lighter than laptops, low power draw, all the digital i/o. It would be a very versatile research and monitoring tool.
Frank Lautenschlaeger
Great job guys,
We enjoyed the testing session tremendously and are very happy to see this project succeeding.
From the ESA/EAC team,
Go Astro-Pi